Contrairement aux dispositifs de centrifugation, le procédé mis au point par I-Sep est capable, lors d'une opération chirurgicale, de traiter et de réinjecter au patient ses globules rouges, mais aussi ses plaquettes.
Entretien avec Jocelyne Troccaz, spécialiste de robotique médicale. Ses recherches sur l’aide à la biopsie de la prostate améliorent la prise en charge de ce cancer masculin. Par Serge Abiteboul, École normale supérieure (ENS) et Claire Mathieu, École normale supérieure (ENS)
Binaire : Jocelyne, pourrais-tu nous parler de ton domaine de recherche ?
Jocelyne Troccaz : Je travaille en informatique et en robotique, au service des gestes médico-chirurgicaux assistés par ordinateur. Il s'agit de concevoir, développer des systèmes, inventer des dispositifs pour aider les cliniciens lors de leurs interventions, pour le diagnostic, ou la thérapie. C'est prioritairement guidé par les besoins cliniques. On a les pieds dans la clinique et on espère aider les cliniciens à résoudre de vrais problèmes qu'ils rencontrent. Les domaines de l'informatique qui sont les plus pertinents dans mon travail sont le traitement d'images, du signal la robotique vue du côté de la programmation et de la modélisation et l'IHM. L'IA aussi.
Comment en es-tu arrivée là ?
J'ai suivi une licence, une maîtrise et un DEA d'informatique. J'ai étudié l'intelligence artificielle avec Jean‑Claude Latombe et Christian Laugier en particulier, le raisonnement géométrique pour comprendre et reproduire le mécanisme de la préhension d'objets par des robots. Il n'y avait là rien de médical. Après avoir soutenu ma thèse en 1986, je suis entrée au CNRS en 1988. En 1990, je me suis réorientée en rejoignant un laboratoire CNRS de Technologies pour la Santé à l'Université de Grenoble, TIMC, physiquement implanté à l'intérieur du CHU. C'est là que j'ai rencontré le domaine médical et j'ai découvert que c'était à cela que je désirais consacrer mon énergie et ma créativité. Je me suis même posé la question d'entreprendre des études de médecine. Je ne l'ai pas fait, mais j'en ai appris suffisamment pour comprendre les problèmes cliniques et essayer de trouver des solutions.
Qu'est ce qui est spécifique à la robotique médicale ?
Les êtres humains. Pendant ma thèse, quand on mettait des robots en marche, tout le monde se tenait à distance car c'était potentiellement dangereux. À TIMC, l'une des premières interventions que j'ai vues, c'était un bras robotisé qui passait à dix centimètres de la tête d'un patient, j'étais effarée. Le robot est à côté, voire à l'intérieur du patient. Les cliniciens sont tout proches. De plus, les tâches qu'on va faire faire au robot ne sont pas stéréotypées comme dans une ligne d'assemblage. Chaque patient est un cas particulier ; parfois aussi, les organes bougent ou se déforment, et le robot doit s'adapter en permanence. Et puis, un bloc opératoire est un environnement très contraint en termes d'espace, avec des contraintes de propreté, des contraintes électromagnétiques, etc., et toute une batterie de règlements auxquels il faut obéir.
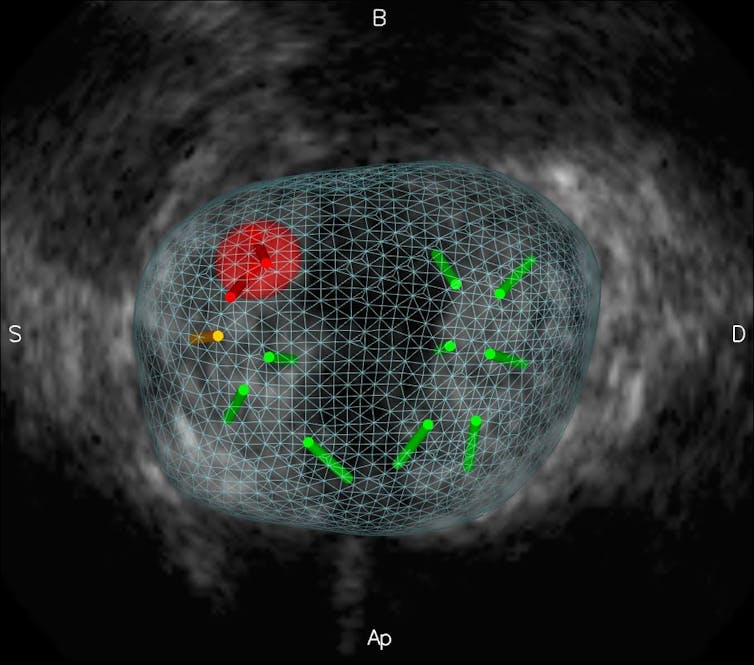
Utilisation de la fusion d'images en urologie pour les biopsies de prostate : visualisation per-opératoire d'une zone cible (en rouge) et de la forme de la prostate (maillage) issues de l'IRM préopératoire ainsi que des biopsies déjà réalisées (cylindres verts, jaunes et rouges). Koelis, Author provided
Ce sont toutes ces contraintes qui guident les comportements des robots ?
Les images du patient sont à la base des décisions. Il faut être capable d'y lier la planification des gestes. Il faut fusionner des informations provenant de plusieurs sources, modéliser des processus de déformation des organes sur lesquels on agit. On utilise des capteurs, mais on utilise aussi des modèles statistiques, biomécaniques, ou mixtes. Il faut également gérer les interactions entre l'utilisateur et le robot.
Newsletter
Ma Tribune
L’actualité qui compte pour vous, chaque jour dans votre boîte mail.
Et d'autres problématiques peuvent intervenir. Par exemple, pour des minirobots qui vont dans le corps du patient et peuvent y demeurer, on a la question des sources d'énergie. On travaille sur un tel robot et on se propose de lui fournir de l'énergie en utilisant les ressources du corps humain (sucre, ions, etc.). On fait coexister biologie et robotique.
C'est par exemple, le M2A, un objet autonome à peu près de la taille d'un gros antibiotique. Le patient l'avale ; dedans il y a une caméra, de la lumière, des batteries ; ce dispositif prend des images de l'intérieur du tractus digestif, et périodiquement les envoie à un boîtier qui se trouve à la ceinture du patient. C'est utile pour des examens endoscopiques, en particulier pour la zone médiane de l'intestin qu'il est difficile à atteindre par moyen classique. Ce type de système est passif et de nombreuses équipes cherchent à pouvoir en contrôler la trajectoire.
Quels sont les grands défis de ta discipline ?
Un défi est la question de l'autonomie décisionnelle des robots. Par exemple, en radiothérapie, on délivre des rayons X sur une tumeur, et plus il y a des incidences nombreuses avec des petits faisceaux, plus vous pouvez être précis. C'est comme faire de la peinture avec un rouleau ou avec un pinceau fin. Un robot nommé Cyberknife existe actuellement en radiothérapie, et il porte un système d'irradiation. À ce robot, les chercheurs ont ajouté la capacité de suivre la respiration du patient. Quand on respire, la tumeur bouge. Ils ont développé un modèle qui corrèle le mouvement facilement détectable de la cage thoracique avec celui de la tumeur, et le robot utilise cela pendant le traitement pour mieux diriger les radiations vers celle-ci. Avec une telle autonomie de prise de décision, il faut garantir la sécurité ; le partage des prises de décision avec un opérateur humain devient un défi important. Aujourd'hui, l'homme décide, le robot réalise. Mais on assiste à un début de glissement : le robot décide certaines choses. Plus on aura des robots qui agissent de manière un peu autonome sur des tissus mous où tout n'est pas modélisable a priori, plus ces questions se poseront.
Un autre défi, qui n'est pas spécifiquement lié à la robotique, c'est de pouvoir démontrer une valeur ajoutée clinique. Qu'on développe un dispositif, un robot, ou une méthode de traitement d'images médicales, il faut en faire une évaluation technique : cela doit être correct, répétable, et conforme à ce qu'on devrait avoir. Mais il faut aussi démontrer un bénéfice clinique : par exemple, il y a moins d'effets secondaires, ou le patient passe moins de temps à l'hôpital, ou ça coûte moins cher, etc. Ce n'est pas toujours simple. Par exemple on parle beaucoup du robot médical Da Vinci, mais il coûte très cher et en ce qui concerne son bénéfice clinique pour les patients, les études sont contradictoires. Par contre, il est certain que la formation des cliniciens à la technique de laparoscopie est beaucoup plus simple et rapide avec ce robot.
Il y a des difficultés spécifiques au travail avec des cliniciens. Quand on travaille avec des gens d'un domaine différent du sien, il peut être difficile de se comprendre. Déjà, il y a le problème du vocabulaire : la première année, je ne comprenais rien au jargon médical. On finit par apprendre et on découvre alors le plaisir d'interagir avec des personnes d'une culture très différente. C'est une chance et une richesse d'avoir un labo si proche des cliniciens du CHU.
N'y a-t-il pas un risque, pour l'humain, d'être dessaisi du pouvoir décisionnel, de se retrouver juste là à admirer ce que fait le robot ?
De mon point de vue, l'idée n'est pas de remplacer le clinicien. Pour les choses que nous faisons bien, ce n'est pas la peine de remplacer l'humain par une machine ; il y a beaucoup de choses que l'humain fait mieux que le robot. Pour la dextérité, les gestes fins de l'humain peuvent être excellents grâce à sa perception haptique. Pour l'intelligence, l'humain est très bon en ses capacités d'analyse et de prise de décision surtout dans des conditions critiques. Il faut voir ces dispositifs comme le moyen de faire faire aux robots des choses que nous ne faisons pas bien nous-mêmes ou avec des moyens non robotisés. Aujourd'hui, si on confie des tâches à un robot qui travaille de manière autonome, ce sont des tâches encore limitées ; par exemple, quand le robot se synchronise sur la respiration du patient pour la radiothérapie.
Évidemment, je parle de la situation actuelle, mais avec le deep learning et les évolutions futures, il y aura sans doute de plus en plus de tâches et des tâches de plus en plus complexes qui seront déléguées à des machines. En tout cas, ce qui me semble fondamental, c'est que si un robot prend des décisions, il puisse les expliquer aux humains qui l'accompagne et que ces méthodes permettent l'interaction et la prise de décision conjointe.
Utilisation d'un robot porte-endoscope contrôlé par commande vocale. Le dispositif développé au laboratoire TIMC a été industrialisé par la société Endocontrol Medical. CHU Grenoble Alpes, Author provided
De ta formation initiale, qu'est ce qui t'a été utile pour ta recherche ?
À l'époque, en informatique, on apprenait surtout à programmer, à faire de l'algorithmique. Ça apprend à réfléchir de manière méthodique, et structurée c'est extrêmement important. On enseignait aussi les algorithmes numériques, qui ne me passionnaient pas, mais je le regrette un peu, car ça m'est utile tous les jours. Mes cours d'électronique, je ne suis pas sûre que ça m'ait servi à grand-chose. Globalement, je crois que ma formation m'a assez bien préparée. Et puis, on apprend beaucoup « sur le tas » : la robotique, je l'ai apprise en faisant ma recherche parce qu'elle n'était pas encore enseignée. Par contre, les mathématiques de base, les manipulations de matrices par exemple, c'est évidemment indispensable et ça, il vaut mieux l'avoir appris dans ses études. Peut-être une chose qui m'a manquée, c'est d'apprendre une méthodologie expérimentale, pour concevoir une expérience, analyser ses résultats, comprendre ce qui ne marche pas. J'ai surtout appris cela « sur le tas ».
Apprendre « la robotique », qu'est-ce que ça veut dire ?
Dans mon premier laboratoire, on travaillait sur les aspects algorithmiques de la robotique, la modélisation géométrique, la prise de décision. En arrivant à TIMC, je m'imaginais connaître la robotique, mais j'y ai découvert d'autres aspects indispensables : la calibration de robot, la préparation de manips, le contrôle de plus bas niveau du robot et bien évidemment l'imagerie qui nourrit la planification du robot. Ce que j'aime dans la robotique, c'est la diversité des tâches et des disciplines concernées. Nous écrivons beaucoup de programmes informatiques. Mais, il nous arrive aussi de concevoir des robots, c'est-à-dire d'inventer des dispositifs nouveaux d'un point de vue architectural, d'un point de vue physique, introduisant de nouvelles formes d'interactions avec les humains. On va jusqu'à la réalisation de ces dispositifs, y compris leur mise en œuvre clinique.
Quelles sont des choses que tu as faites et dont tu es particulièrement fière ?
Je suis fière de travaux sur la « co-manipulation » réalisés dans les années 1990 que j'appelais « robotique synergique » et qui étaient très innovants. L'outil est porté par le robot mais tenu également par l'opérateur humain. Ainsi le robot peut « filtrer » les mouvements proposés par l'opérateur. Cela permet de faire cohabiter planification globale et ajustement local, assistance robotisée et sécurité car le clinicien est « dans la boucle ». Cette approche intéresse beaucoup les cliniciens.
Les autres choses dont je suis le plus fière sont les systèmes qu'on est arrivé à amener jusqu'à une utilisation clinique. Il n'y a rien de plus gratifiant que de voir son propre système utilisé sur des patients en routine clinique. Par exemple, je travaille avec le CHU de Grenoble et la Pitié-Salpêtrière sur le cancer de la prostate depuis longtemps, du point de vue à la fois du diagnostic et du traitement.
Côté diagnostic, pour faire une biopsie de la prostate, il y a des carottes de tissu qui sont prélevées puis examinées au microscope. Ces biopsies sont faites sous contrôle échographique, avec une sonde mise dans le rectum du patient. Or la prostate est un peu comme une châtaigne, et quand on bouge la sonde ça bouge la prostate ; du coup ce n'est pas très facile de savoir où est faite la biopsie. En cas de cancer, la recommandation en France, c'est de faire 12 biopsies, les « mieux réparties possibles » dans la prostate. Comment vous faites pour bien les répartir ? L'idée qui a germé a été de développer des méthodes de fusion de données ultrasonores, échographie et IRM. On travaille en 3D. On a développé des méthodes de recalage d'image pour s'orienter dans l'espace. J'ai eu la chance d'avoir deux étudiants en thèse brillants, l'un urologue et l'autre d'une école d'ingénieur sur ce thème. Les méthodes de recalage en trois dimensions se sont avérées robustes et complètement automatiques. Cela a débouché sur un dispositif industriel de la société KOELIS. Plus de 250 000 patients ont maintenant eu des biopsies avec ce dispositif, dans 20 pays, sur 4 continents.
Au début, certains urologues disaient que ça ne servait à rien, qu'ils se débrouillaient bien sans, mais leur point de vue a évolué. La chirurgie peut avoir des effets secondaires graves d'incontinence ou d'impuissance, et les gens se posent donc beaucoup de questions sur la décision de traitement et son type, alors si on sait mieux faire les biopsies, on peut faire un traitement plus adapté. Les gens ont commencé à dire qu'au lieu d'enlever la prostate toute entière, si on localise mieux le cancer, on peut n'enlever qu'une partie de la prostate. On était dans une phase d'évolution de la pratique clinique et l'outil développé allait dans le sens de cette évolution. Il est maintenant très bien accueilli.
L'informatique s'est rendue indispensable à la médecine. On a construit les premiers scanners il y a cinquante ans. Le scanner n'existerait pas sans l'informatique. Les dispositifs d'imagerie qui sont capables de reconstruire une image en trois dimensions à partir de radios n'auraient pas d'existence s'il n'y avait pas de tomographie.
Comment vois-tu une bonne formation d'étudiants ?
Pour ce qui est de l'informatique, ce serait bien si les élèves avec un master d'informatique avaient une formation un peu plus homogène. C'est génial de picorer des choses à droite à gauche, mais ça rend leur intégration plus difficile pour nous, car les étudiants peuvent avoir le diplôme et avoir des lacunes importantes sur des aspects basiques de l'informatique.
Pour ce qui est de la formation en médecine, on voit se développer des simulateurs informatisés pour la médecine et la chirurgie. Les étudiants ne pratiquent plus une opération la première fois directement sur un corps vivant ou sur un cadavre, ils s'entraînent sur des simulateurs. L'informatique est utile pour cela aussi.
On a développé un simulateur de biopsie, pour enseigner aux étudiants à faire des biopsies sur simulateurs avant de les leur faire réaliser sur des patients. Pour la biopsie de la prostate, il y a eu une expérimentation avec deux groupes d'étudiants en médecine, un groupe avec une formation traditionnelle sur cadavre, et un groupe formé sur le simulateur. Le groupe formé avec simulateur était vraiment meilleur.
La recherche à l'interface entre santé et informatique est passionnante. La plupart de nos étudiants attrapent très vite la fibre. Même si parfois, les challenges posés à l'informatique sont hyper intéressants et que cela peut conduire à des résultats fondamentaux, nous sommes également très motivés par la résolution de questions posées par la santé.
_______
Par Serge Abiteboul, Directeur de recherche à Inria, membre de l'Académie des Sciences, École normale supérieure (ENS) et Claire Mathieu, Directrice de recherche CNRS, Paris, École normale supérieure (ENS)



 Utilisation de la fusion d'images en urologie pour les biopsies de prostate : visualisation per-opératoire d'une zone cible (en rouge) et de la forme de la prostate (maillage) issues de l'IRM préopératoire ainsi que des biopsies déjà réalisées (cylindres verts, jaunes et rouges). Koelis, Author provided
Utilisation de la fusion d'images en urologie pour les biopsies de prostate : visualisation per-opératoire d'une zone cible (en rouge) et de la forme de la prostate (maillage) issues de l'IRM préopératoire ainsi que des biopsies déjà réalisées (cylindres verts, jaunes et rouges). Koelis, Author provided
 Utilisation d'un robot porte-endoscope contrôlé par commande vocale. Le dispositif développé au laboratoire TIMC a été industrialisé par la société Endocontrol Medical. CHU Grenoble Alpes, Author provided
Utilisation d'un robot porte-endoscope contrôlé par commande vocale. Le dispositif développé au laboratoire TIMC a été industrialisé par la société Endocontrol Medical. CHU Grenoble Alpes, Author provided






